移栽FreeModbus+ModbusMaster+STM32至RT-Thread(3、4阶段)
日期:2014-05-16 浏览次数:20858 次
一、简介及进展
经过一个多月的努力,目前项目开发已进入最后阶段。虽然比预期时间有些延迟,但也收获不少,边工作边开源的效率确实还有待提高。
简单说下目前的进展吧
1、目前项目已经在Github中开源,大家需要的也可以去这里https://github.com/armink/FreeModbus_Slaver-Master-RTT-STM32;
2、主机的相关的框架已经修改完成,初始化、配置Modbus主机相关接口与原有从机接口基本相同;
3、移植主机相关硬件配置与原有从机方式一致,需要修改FreeModbus源码中port文件夹中后缀带_m相关文件;
4、Modbus主机请求功能目前只实现了所有与寄存器相关的功能,别的功能后期提供支持,比较容易,只是体力劳动而已;
5、目前的Modbus主机请求功能是异步模式,后期考虑方便上层调用,可以同时给上层提供同步模式的控制方法;
6、主机的异常处理任务还未添加,只留了接口,后期考虑给上层提供回调接口,相关异常功能上层也能自动做处理;
7、目前最新代码同时支持Modbus主机及Modbus从机两种模式,两者互不干涉,用户可以在/FreeModbus/modbus/mbconfig.h中自行裁剪。
目前的进展就这些吧,实际上我之前想把主机的请求以任务队列的方式进行实现,FreeModbus主机自动完成任务的调度,上层只需要关注结果即可,但是这样也有很多弊端,太多的异步任务会使整个项目变得非常混乱,大家如果有想法也可以留言。
源码下载:点击下载
下面介绍一下FreeModbus主机的使用说明
二、使用介绍
1、硬件移植
打开源码/FreeModbus/port目录,里面的文件有以下内容
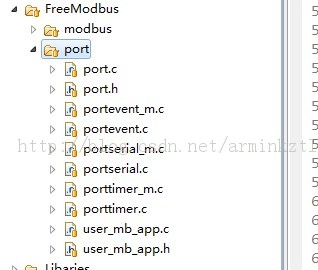
因为我这里主要讲的是有关主机的功能的移植,所以大家只需要关注带有“_m”后缀名的文件,修改方式与从机一致大家可以参考之前移植从机的文章:http://blog.csdn.net/arminkztl/article/details/9745725,网上关于从机的移植介绍非常多,我的不一定是最好的。
注:user_mb_app.c文件包含了主从机相关回调功能的实现及Modbus物理结构的定义,用户也可以做适当的修改,里面的回调方法已经严格测试过,尽量不要去碰。
2、测试
做完主机相关硬件移植工作,即可开始验证工作
测试的流程与测试从机基本类似,先初始化Modbus主机,再使能Modbus主机,通过线程轮训方式与“Modbus Slave”通信,观察软件界面中的数值与要求的是否一致。详细说下每个环节吧。
1、增加两个线程一个起名:SysMonitor(系统监控),另一个起名:ModbusMasterPoll(Modbus主机轮训);
2、在系统监控线程中增加请求Modbus寄存器相关操作命令、获取RTT的CPU利用率、闪烁指示灯和喂狗功能,1S执行一次;
代码如下:
//***************************系统监控线程***************************
//函数定义: void thread_entry_SysRunLed(void* parameter)
//入口参数:无
//出口参数:无
//备 注:Editor:Armink 2013-08-02 Company: BXXJS
//******************************************************************
void thread_entry_SysMonitor(void* parameter)
{
while (1)
{
cpu_usage_get(&CpuUsageMajor, &CpuUsageMinor);
usSRegHoldBuf[S_HD_CPU_USAGE_MAJOR] = CpuUsageMajor;
usSRegHoldBuf[S_HD_CPU_USAGE_MINOR] = CpuUsageMinor;
LED_LED1_ON;
LED_LED2_ON;
rt_thread_delay(DELAY_SYS_RUN_LED);
LED_LED1_OFF;
LED_LED2_OFF;
rt_thread_delay(DELAY_SYS_RUN_LED);
IWDG_Feed(); //喂狗
//Test Modbus Master
usModbusUserData[0] = (USHORT)(rt_tick_get()/10);
usModbusUserData[1] = (USHORT)(rt_tick_get()%10);
eMBMasterReqWriteHoldingRegister(1,usModbusUserData,3);
// eMBMasterReqWriteMultipleHoldingRegister(1,usModbusUserData,3,2);
// eMBMasterReqReadHoldingRegister(1,3,2);
// eMBMasterReqReadWriteMultipleHoldingRegister(1,usModbusUserData,3,2,5,2);
}
}
3、在Modbus主机轮训线程中增加FreeModbus初始化(波特率115200、偶校验、RTU、串口2),及FreeModbus主机轮训方法;
代码如下:
//************************ Modbus主机轮训线程***************************
//函数定义: void thread_entry_ModbusMasterPoll(void* parameter)
//入口参数:无
//出口参数:无
//备 注:Editor:Armink 2013-08-28 Company: BXXJS
//******************************************************************
void thread_entry_ModbusMasterPoll(void* parameter)
{
eMBMasterInit(MB_RTU, 2, 115200, MB_PAR_EVEN);
eMBMasterEnable();